Research
Project Plans
Introduction of Research Areas
Cognitive Robotics and Intelligent Automation integrates many different component disciplines and technologies, such as computing technology, computer vision, sensors, actuators, control, and artificial intelligence. Advances in these component technologies have often driven robotics forward, and in return robotics has often provided the applications to motivate advances in the component technologies. In this joint international research intensive center of excellence (iRiCE) we plan to focus on research in Core Technologies of Cognitive Robotics and Intelligent Automation with special emphasize on the following areas and technological needs:
- Intelligent Robot Integrated Manufacturing Automation
- Medical and Healthcare Robotics
- Service Robotics
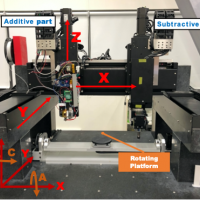
5-Axes Synchronous Motion 3D Printing Equipment for Digital Manufacturing Applications
The objective of this research is to present the development of 3D digital manufacturing through
synchronous 5-axes printing for greatly enhancing the strength of the printed parts. In this research, we developed the algorithms for synchronous five axes printing based on the surfaceprinting trajectory to overcome the traditional lack of strength issue. Five axes printing can achievethe goal of printing in different orientations so that the strength of the printed parts is greatly enhancedin comparison with the printing in a fixed direction only. The five axes synchronous 3D printing has beensuccessfully demonstrated in physical printing includingnon-supporting structure printing.

33 DoF Quasi-Natural Humanoid Robot
The objective of this research is to develop a quasi-natural humanoid walking trajectory generator based on five-mass with angular momentum model using feedforward-feedback control. This approach aims to minimize the modeling error and improve the frequency characteristics due to non-minimum phase property, so that the tracking accuracy increases and walking performance can be enhanced. Using feedback and feedforward controller based on the proposed model, the humanoid walking pattern generator is verified and demonstrated with humanoid robot developed in our laboratory.
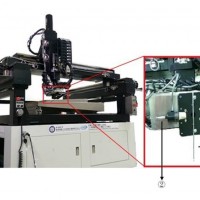
Omnidirectional Touch Probe With Adaptive Maneuvering for 3-D Complex Object Machining and Measurement Verification Applications
In this research, automated omnidirectional touch probe (ODTP) including adaptive tuning of the complex contour curve with optimal interpolation and motion planning based on a hybrid multiaxis robot (HMAR) with dual drive gantry-type machine (DDGM) are developed. It is called an вҖңomnidirectionalвҖқ because the 6-degrees of freedom ODTP in tool center point mode can always maintain normal direction towards the object contour curve. The new optimal solutions of the interpolation and motion planning are provided to tackle the small segments issues for a complex curvature object. We developed an algorithm to maintain maximum acceleration, so that it generates smooth and efficient three-dimensional reverse object in a higher order complex contour trajectory composed of piecewise small segments. As a result, the constant moving speed is very important to certain applications, such as gluing, welding, and laser cutting, to preserve quality processing. The utilization of object symmetry, extension, and synthesis properties to simplify the process of performing reverse engineering is described. These methods reduce the time required for the touch probe to detect the points. The experimental implementation to demonstrate the success of this research with video clip are developed.

Visual tracking and recognition of intelligent service robots used in sensor fusion theory (III)
Based on the vision based SLAM (Simultaneous Localization and Mapping)
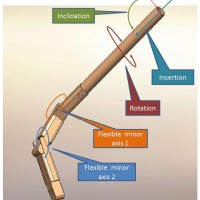
Intelligent Multi-DOF Robotic Endoscope System with Sensorless Force Detection for Assistive Minimally Invasive Surgery
Main Project and Sub-project : Intelligent Multi-DOF Robotic Endoscope System with Sensorless Force Detection

The Research of 7 Degrees of Freedom Robotic Manipulator
The robotic manipulator has been widely utilized in Automatic Production Line. Typical robotic manipulator which has six degrees of freedom makes end effector do three orientation translation and rotation. Human arm which is more dexterous than typical robotic manipulator has seven degrees of freedom which make human do more complex movement. In some application, for example curve welding, because of narrow workspace and complex movement, it is appropriate that we use seven degrees of freedom.

Education Entertainment Companion Robot
The Covariance Intersection (CI) is a data fusion algorithm which takes a convex combination of the mean and covariance in the information space. This figure shows Covariance Intersection Fusion Result on Robot Pose Translation (a) x-direction (b) y-direction.

Preview and Force Control of Non-Constant Height Biped Walking Robot
This project proposes a control architecture for the biped walking robot with non-constant COM height. The walking pattern with up and down COM motion is generated by preview control with optimal COM height trajectory to save time consumption. A feedback force controller takes the COM as the operating point to achieve a compensation of the motion of COM.
Robot Operating System (ROS)
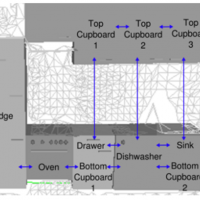
What is Semantic Map?
Semantic Map is a format in which we store our knowledge. Semantic map correlate the knowledge of objects and scenes to a location in the map, which means that establishing the relationship between the environment and objects.(fig 1.1, fig 1.2) Additionally, the Semantic Map can be used when doing some advanced tasks. Modules that use Semantic Map directly include Navigation, Collision Avoidance, Localization and Mapping, Path Planning, and Human Robot Interaction, etc.

Medical and Health care Robot
Nowadays in such a busy society, if someone would like to relief the stress and pressure from the heavy work load by massage, mostly will need a well trained professional massage expert. However, the entire massage therapy process requires much time and most importantly, it is indeed a labor intensive task. In addition, due to such a time consuming job, the massage expert can serve only a few customer per day. Furthermore, it is also quite expensive for a massage therapy by paying more than 1,000 NTD an hour.