Medical and Health care Robot
Nowadays in such a busy society, if someone would like to relief the stress and pressure from the heavy work load by massage, mostly will need a well trained professional massage expert. However, the entire massage therapy process requires much time and most importantly, it is indeed a labor intensive task. In addition, due to such a time consuming job, the massage expert can serve only a few customer per day. Furthermore, it is also quite expensive for a massage therapy by paying more than 1,000 NTD an hour.

Development of Intelligent Massage Therapy Robot
The trends of the future robotics development towards not only co-exist with mankind but also become good companion and partner. Therefore, the design of the robot needs to take many factors into consideration such as, safety, reliability, robustness and friendliness. The objectives of this proposed research will develop such an intelligent robot with abovementioned functions. The structure of this research will include the development of a soft arm equipped with robot hand to perform dexterous manipulations. Through sensory fusion and integration with interactive behavior control of the robot, we expect to accomplish the goal as desired. The success of this project can extend the further opportunity for the robotics applications in the field of impaired and elder cares.
主要架構組成包括:按摩床主體、柔性手臂(Soft Arm)和靈巧手爪(Dexterous Manipulator)的半身人形機器人及影像偵測及生理訊號感測模組。其特色如下:
(1) 安全機器手臂
具有6個自由度,可實現人類手臂般靈巧的動作。機械手臂著重肩部、肘部關節安全機構的設計,藉由在驅動馬達輸出端加上機械式可控制剛性之關節機構設計,輔以智慧型控制系統,可有效避免機器手臂在運動過程中對人體產生不當的碰撞,達成安全機器手臂之功能。具有靜態及動態避障功能,可最小化驅動速度及加速度,及可對運作標的做功能最佳化。
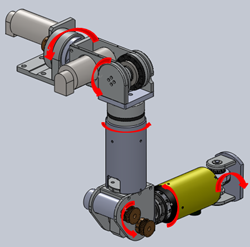
機械手臂圖
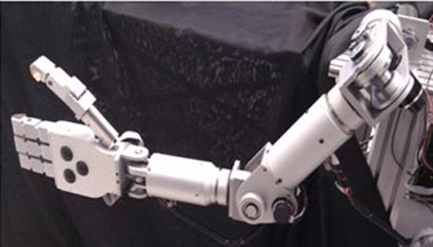
(2) 多指機器手掌
不同於既有國內外研發之機器手臂的運用訴求,以緊密模組化的手指設計,具有8個自由度,搭配高輸出扭力的馬達與減速機,四指機器手掌具有最高42N的輸出按摩力道,可模仿專業按摩師提供抓(Kneading)、揉(Rubbing)、拍(Tapping)、壓(Acupressure)等按摩療程,重現專業按摩師手掌的按摩力道與手法,提供使用者有效舒適的按摩療程。


機器手掌及指壓球
(3) Research Approaches
This project is approached through three steps. Firstly, we built basic robot arm and hand system. The hand system include four finger, and special design for dexterous. The sensor system is mounted on both hand and arm to capture information from human body. For the next step, we are focus on the interaction between massage robot and human body, and tried to develop an algorithm and scenario for massage. Finally, the developed massage robot did the massage scenario for multiple human with EMG sensor. From the experiment, we can estimate the massage system, and compare EMG data with the tradition massage.
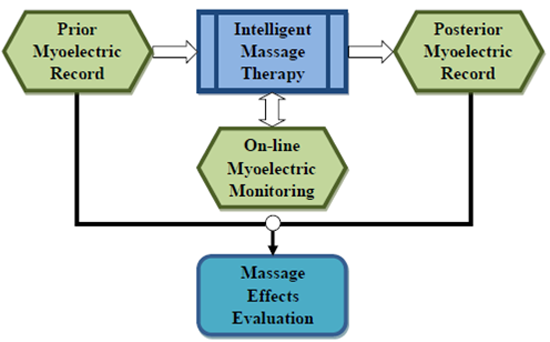
Massage System Architecture


Human-robot interaction- the control and application of humanoid arm
The humanoid robot arm we designed has six degrees of freedom. We use Intelligent Motion control Platform (IMP) as the computing core, and burn the algorithm to the IMP to ensure the stability of the clock in every operation. To elucidate, Algorithm we used combines with the development of force feedback compensation control and impedance control to achieve compliance control. Moreover, the arm has gravity compensation, auxiliary power compensation control, and force feedback compensation includes a multi-axis arm in the gravity compensation. In addition, compensation in addition to enhance the performance of the control also extended to many application level, to enhance the mechanical arm and the contact interaction, such as to comply with the control and teaching <Teach & Play> .
Figures 1 and 2 in teach and play mode <Teach & Play>. The concept is that a person teach the robot to write, at the beginning, and the robot will write (or replay) what they had been taught. With gravity compensation and auxiliary force compensation, the robot arm can easily be driven by the human to write. To elucidate, this <Teach & Play> can be achieved by recording the information of encoder and current feedback, and then we can let robot arm to replay the trajectory we taught at the same time span and torque output.
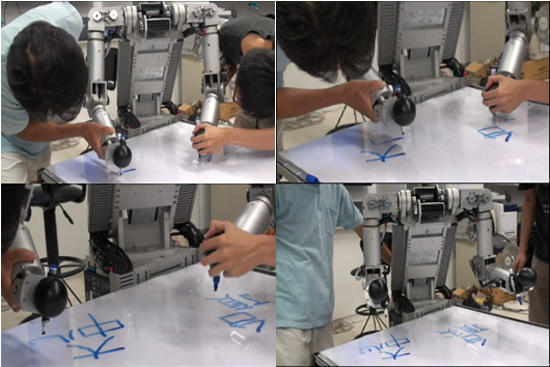
Figure 1、In the “teach mode”, human bring robot arms to write「台大頂尖中心」
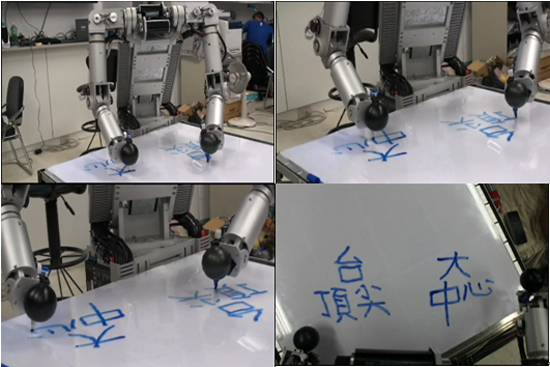
Figure 2、In the “play mode”, robot can write「台大頂尖中心」 on himself.
Rehabilitation robot system
The prospective of the project is to build a duel arm rehabilitation robot system based on multi-sensors, and apply the system on clinical applications. The project can be divided into three highly associated subprojects integrated by the main project, including the hardware/software integration of the prototype, both theory and implementation are involed in this proposal. In addition, verification, and the feasibility and safety evaluation report of the clinical experiments and applications will also be included.
Based on the high precision, high reproducing accuracy, and the ability to repeat monotonous and continuous actions of the robot arm, it can rehabilitate or evaluate the shoulder and elbow of the patient. During the treatment process, various linear trajectories of action training are designed and command through the active motion of the arm of the patient, which enables the arm of the patient rehabilitated by the robot arm along the required trajectories. At the same time, the robot arm can record the parameters of the arm of the patient, such as the position, angle, or force of each joint, and summarize the above information to give out a set of objective and quantitative evaluation indicators.
For the patients with partial or total upper limb paralysis, a robot system that can assist the rehabilitation process is able to train the ill limb through symmetric action training and repair the balancing functions of the brain. This project can be separated into three stages and run for three years. In the first two stages (first two years), facing to the robot and back to the robot exoskeleton rehabilitation robot system for single arm will be developed for patients with partial upper limb paralysis. The patient is able to train his or her paralyzed limb with the help of the healthy limb. Evaluation of the feasibility and safety of the system will be discussed in the reports. As for the third stage (the third year), a back to the robot exoskeleton rehabilitation robot system with duel arm exoskeleton rehabilitation will be developed for patients with total upper limb paralysis. Through the command of the patient, the patient is able to control the motion of the exoskeleton robot arms, and thus the sensor-motor neuron system are trained to help the upper limb of the patient rehabilitated. Stochastic control clinical experiments will also be implemented to discuss the feasibility and safety of the upper limb rehabilitation robot system.
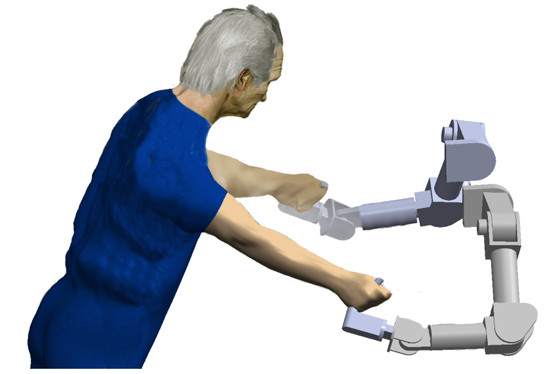
Rehabilitation robot system
Intelligent Multi-DOF Robotic Endoscope System with Sensorless Force Detection for Assistive Minimally Invasive Surgery
1.Motivation of Research:
Currently the CCD is operated by an assistant who is commanded by surgeon. The surgery time will become longer due to the bad teamwork between the assistant and surgeon. The proposal(Intelligent Multi-DOF Robotic Endoscope System with Sensorless Force Detection) provides a way to accord the different angle of the Motion Node which is mounted on the head of surgeon with an ENABLE/LOCK function to operate the position of the endoscope. The system makes the surgeon can process the surgery and operate the endoscope himself simultaneously. The force feedback will provide the moving resistance of the endoscope to surgeon. This design can avoid patient’s organ to be hurt by the moving endoscope. The system substitutes for endoscopic assistant, it can reduce manpower and improve surgical efficiency and efficacy.
2.Research Approaches:
The system substitutes for endoscopic assistant, it can reduce manpower and improve surgical efficiency and efficacy. The overall control structure shown as below:
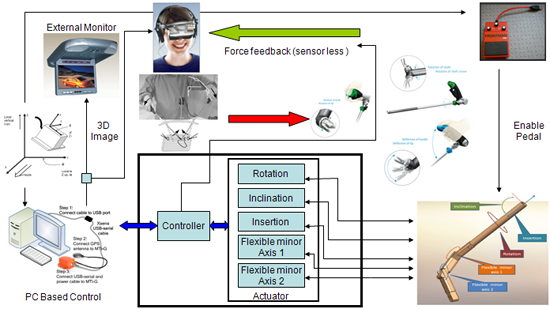
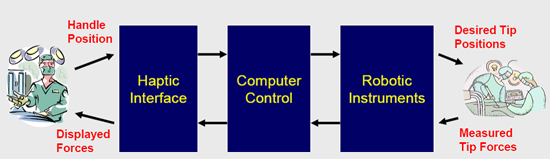
The proposal provide a sensorless Haptic technology to read motor driver feedback current, and accord the feedback current level to know the reactive force of the end-effector. The Haptic force feedback laprascopic concept’s structure shown as below.
3.Research Results:
There are two main features of our velocity control design. Firstly, we can set a desired constant speed and move toward the target position with the setting speed is allowed, this function would save the moving time of the endoscope. Secondly, setting the slow down point in front of the target position is also allowed. It means the endoscope will move with presetting constant speed toward the target position. When the endoscope moves to the predefined slow down point, it slows down movement gradually until the arm reaches the target position. The function here can increase the efficiency and safety of the arm moving, and important things are we not broken the features of the impedance control to implement the constant speed control, such as the force control and high precise positioning.
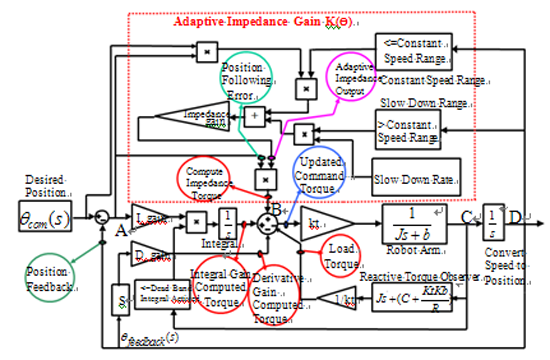
4.Innovations and Contributions:
Upper half portion of above Figure shows the gain scheduling algorithm which generate an adaptive impedance gain to implement the efficient velocity control. The endoscope will moves fast when it far away the target and slowdown the speed to move forward close the target, and this design is for safety.