無感測器俱力量偵測功能之智慧型多自由度腹腔鏡機器人系統
無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統-總計畫兼子計畫一
目前的腹腔鏡手術其CCD 鏡頭是由助手依醫師的指示來輔助操作,若配合默契好則能縮短手術 時間,相對的若配合默契不好,則手術時間就會變長。
子計畫一使用安裝在醫師頭部的MotionNode 來讓外科醫師能借由不同的頭部姿勢角度搭配安全啟動/鎖定機制來操作五個自由度的CCD 鏡頭去 定位並同時執行手術,因為醫師是佩戴HMD(Head Mount Display)頭戴式顯示器, 所以可讓醫師在 頭偏擺時不會失去對CCD 所傳回的影像的掌握。
(1) 總計畫: 無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統本整合型計畫中,總計畫的計畫目標是協調統合各子計畫,完成所需的單項關鍵性技術的研發,並整合所有軟硬體介面以及控制技術之模擬及實現應用,進而建置一台功能完整之無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統。本總計畫將開發機器人視覺(Vision)發展。機器人系統能在真實世界的應用服務,必須結合物體視覺辨識和運動規劃系統,機器人與運動規劃系統連結,總計畫之主要目的為研發出無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統,而本子計劃將配合總計劃研發所須的技術, 如無感測器俱力量偵測功能之多自由度智慧型機器手臂,MoitonNode 輸入及end_effector 運動規劃等.。
(2) 子計畫一:無感測器俱力量偵測功能之多自由度智慧型機器人腹腔鏡系統此一部份尚未能在市售的機器人普遍流行,主要的原因是由於控制的精密度,而其價格昂貴是讓生產廠商怯步的主要因素,以致於目前大部分的發展機構,仍多為學術機構。為了能夠在手術的環境下使用,發展出一個行為基於力回饋的內視鏡機器人是一個相當重要且俱有挑戰性的研究。而要能夠在真實世界達成手術應用的機器人必須要主動式控(MoitonNode)跟運動規劃的系統。這樣的要求包含了能夠定位出內視鏡機器人前端的CCD 位置並且回傳到醫生所配戴影像播放器,辨識空間位置來操作內視鏡機器手臂。本計畫會發展出基於力回饋運動控制系統,以及基於多重視覺的即時同步控制技術。子計畫一之無感測器俱力量偵測功能之多自由度智慧型機器人Endoscope 系統,專精於無感測器俱力量偵測功能之多自由度智慧型機器人系統,預計研發出無感測器俱力量偵測功能之多自由度手臂及總計畫第一年 第二年各子系統功能測試、系統實機驗證、各子系統安裝測試、各子系統參數彙整、系統模擬驗證、動物實驗運動規劃等技術,提供子計畫二之肝臟腹腔鏡手術之即時影像融合與呼吸移動補償及子計畫三「無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統」之適用性及可信性研究及驗證。
本子計畫在Endoscope 機構件尚未研發出前, 將先以機器人手臂做為驗証平臺, 本計畫將結合MoitonNode 作為輸入訊號, 機器人手臂將隨著MoitonNode 作跟隨的動作. 本計畫最終將配合子計畫二及三作整合驗證測試, 期待能透過醫師頭戴MoitonNode 藉由符合人因工程的頭部擺動再搭配enable/disable 鎖定機制, 使醫師一人即可完成腹腔鏡手術的執行.整合即時的運動規劃系統及力回饋控制系統能夠達成無感測器俱力量偵測功能之多自由度智慧型機器人系統的任務。
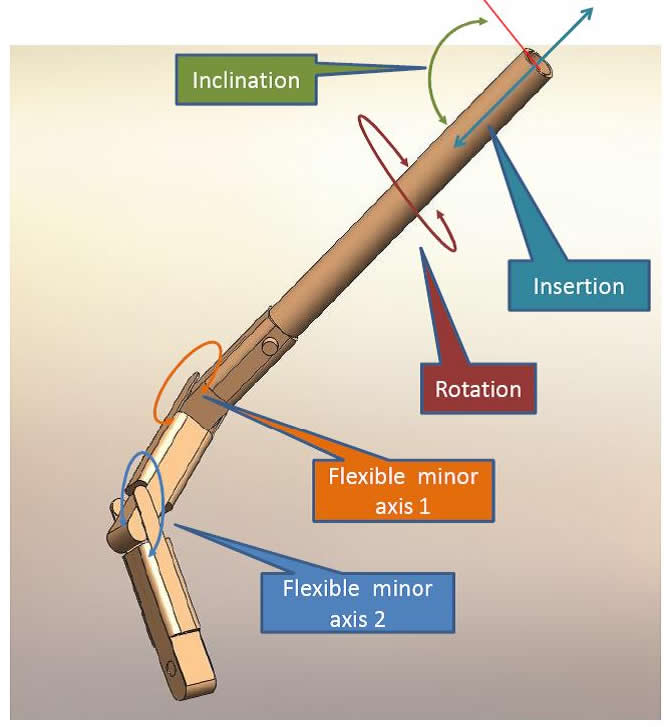
(3)子計畫二:肝臟腹腔鏡手術之即時影像融合與呼吸移動補償本計畫之目的為改良現有之腹腔鏡之前端,目前現有之腹腔鏡,前端進行方位與視角調整的機構,為單/雙節的剛體機構,控制方式則是透過握柄上之單/雙個轉輪進行前端方位調整。本計畫進行兩部分的改良:第一部份將剛性的機構改為撓性,使進行方位與視角調整的機構更俱彈性,需要空間更小,且方便超音波探頭進入,第二部份是將後端的轉輪控制改為電控方式,醫師透過設計之人機介面,進行腹腔鏡前端之方位調整。將開發出來的腹腔鏡機構進行影像融合功能開發,將術前診斷之肝臟電腦斷層掃描所獲得之病灶影像,整合至人機與導航系統以外,並利用術中超音波所得之即時影像,進行軟組織、腹腔鏡影像與術前影像之方位校準,並以此為基礎,將病灶疊合於即時的內視鏡影像,醫師即可透過所提供影像融合技術,充分掌握病灶的空間資訊。最後將著手於人機介面的改善,特別是引進影像處理與影像伺服的技術,提供病灶影像移動凍結的功能,有效解決肝臟在術中移動的問題,透過肝臟上特殊的生理特徵,進行影像特徵比對,計算出肝臟移動的資訊,再以影像伺服技術即時調整前端方位與視角,控制病灶影像停留於可視範圍內,不會輕易移視野之外,提升手術安全性與效率。
(4)子計畫三:「無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統」之適用性及可信性研究第一年建立各層級醫師協助之活體動物腹腔鏡手術時間及常見的錯誤的常模,以作為測試「無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統」適用性及穩定性的參考數據。完成「無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統」之安全性初步測試。第二年對電機工程團隊研發之「無感測器俱力量偵測功能之多自由度智慧型機器人微創手術輔助系統」,進行離體器官及動物實驗。與所建立各層級醫師協助之腹腔鏡手術時間及錯誤常模做比較,測試此輔助系統於臨床運用之適用性及可信性。