有平滑動作的機器人能增加40%的效率
機械手臂(和一般機器人)都是奉命行事──你的命令。你叫他們跳,他們會說:「我是手臂,我不會跳,但是如果你想的話我可以到處移動。」他們要做,就一定會做到最好。對於手臂而言,它存在的理由就是盡快移動到你說的位置,我猜是因為它認為(通常會出錯)你有比坐在那裡看管它更重要的事情要做。
這些快速、精確移動的項目是我們喜歡機器人原因之一,但事實證明,他們並不是特別節能。這可能不是你花費數以萬計資金在機械手臂後所考慮的事情,但是消耗的能源是會疊加的,尤其如果你有數萬隻機械手臂的話。
瑞典查爾摩斯工學院的研究人員,同時擔任歐盟AREUS計畫(自動化與機器人永續製造,Automation and Robotics for European Sustainable Manufacturing)的一部分,致力於機械手臂的效率,並提出優化算法調整加減速以達到減少40%的能源消耗。
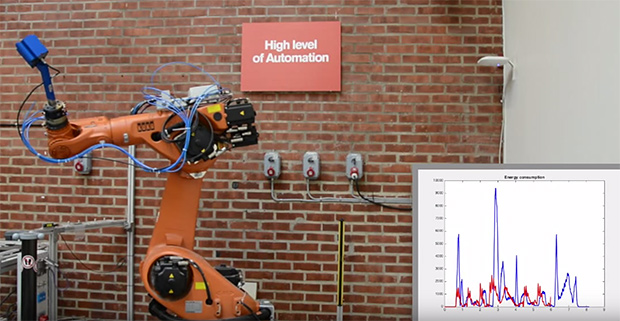
這裡有個算法的演示,它最顯著的是只稍微改變手臂的速度,卻仍保持原運作軌跡。在示範影片的結尾呈現了原始路徑和優化路徑的重疊影像,兩者幾乎無法分辨出來。
根據影片顯示,這些細微的變化減少30~35%的能源耗損,這是驚人的。算式只是告訴手臂在加速和減速時平穩一點,就這樣節約了大量的能源。我們能想像這對電動馬達也有好處,機器人的壽命也得以延長。
如果你讓多個機器人共同工作並調整每次運動以減少停機,可以達到改善5~10%的效率。同時作為額外獎勵,機器人也不會打到對方。
當然,這些都發生在實驗室裡。研究人員指出,未來在產業上需要更進一步的研究,來真正釐清這算法能導致多大的差別。幸運的是,AREUS計畫得到像是戴勒姆股份公司(Daimler)和庫卡股份有限公司(Kuka)的支持,所以我們相當肯定他們能在必要的實際測驗中執行。
目前的研究結果將會於本月底,在瑞典IEEE自動化科學與工程國際會議(IEEE CASE)中發表。