麻省理工學院的擴增實境室展示了機器人的思考方式
大多數時候,我們根本不知道機器人是如何思考的。即使有些為機器人設計程式的人,能根據特定的輸入訊號猜到機器人的反應,但隨著輸入訊號的複雜化以及軟體會綜合這些大量資訊來做出決定,想要知道機器人的下一步變得非常困難。因此麻省理工學院正試圖以擴增實境(AR)來解決這樣的問題。
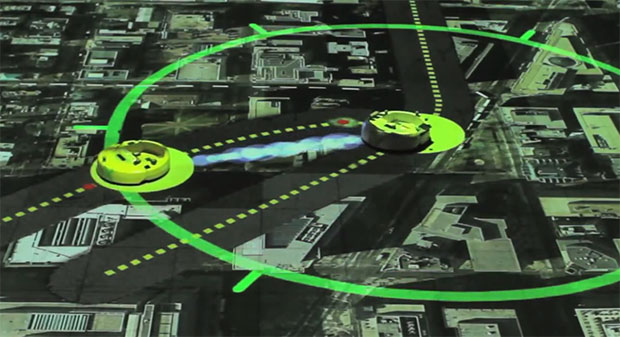
在設計的實驗中,研究人員使用了擴增實境系統來設置一個障礙物(像是行人),放在機器人預計穿過一個虛擬城市的路徑上。該機器人必須探測障礙物,然後計算出最佳路徑,以避免碰撞到該障礙物。在這過程,投影系統將機器人的思考邏輯直接顯示在地面上,讓研究人員能即時看到。而這思考邏輯以虛擬的彩色線條和圓點來顯示障礙物、可能路徑和最佳路徑,而這些將隨著機器人和行人的移動,不斷的變化。
在一定程度上,它應該能夠追溯機器人每一個決定,因為機器人的行為都是能被理解及被控制的。這裡的想法是,通過即時觀察機器人在甚麼時間採取怎樣的行動,對於除錯和讓它運行更可靠的工作也會變得輕鬆許多。
另外一點就是,這個模擬系統是相當大的地面投影,可以用來從事視覺系統測試。這樣的模擬測驗,除了可以測試無人駕駛飛機的飛行路線,甚至還能投射室外環境的景觀模擬。在測試場景中,他們讓四旋翼機飛越了模擬的森林,並顯示從空中看的角度來模擬無人機的視角。研究人員在模擬場景中投影數個火災,並指示四旋翼機採集地形圖像,這樣的模擬最終能教會機器人辨識火災。