Preview and Force Control of Non-Constant Height Biped Walking Robot
本計劃提出一種雙足機器人以非固定高度行走的控制構架. 行走軌跡包含身體質心的上下移動,並由Preview Control 規劃得到。身體質心的高度變化經過優化設計,以實現快速的軌跡生成。一回饋控制器以身體質心作為操作點,實現身體質心運動軌跡的補償。

數學方法
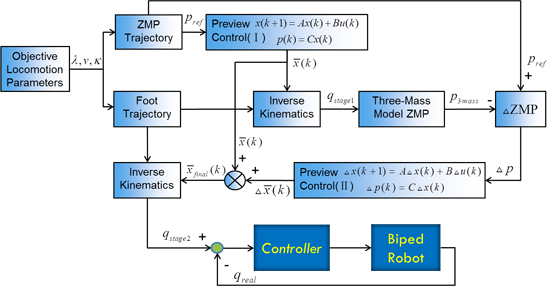
軌跡產生器是依preview control架構所建立的,其裡面有兩個階段。預設的零力矩點軌跡是第一階段的輸入,用來得到最佳化的身體重心軌跡。未來零力矩點的誤差是第二階段的輸入,用來得到適當的身體重心軌跡補償。
預期結果
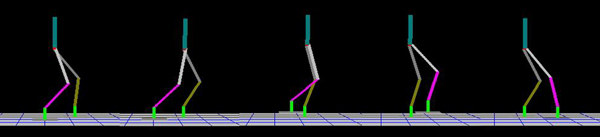
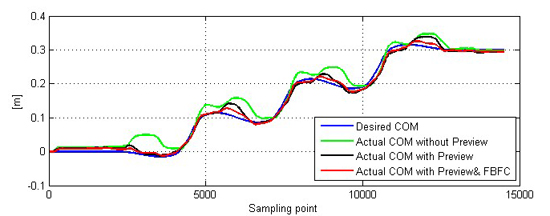
圖一:最佳化後身體重心軌跡
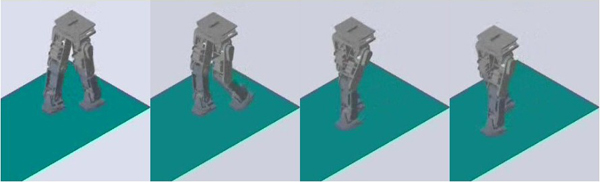
實驗成果