醫療與健康照護機器人
現今繁忙的社會裡,如果想要藉由按摩來紓解一下工作的壓力,大部分的人也許會請受過專業訓練的按摩師予以按壓舒活筋骨,但是整個按摩療程會花掉許多時間,且按摩師的服務是勞力密集的工作,往往只能為為數不多的客人服務;另外人本向來不便宜,一次按摩花費動輒上千元起跳。前面所述的缺點,都是機器人擅長的地方,機器人不會感到疲累,可以連續工作很長一段時間,且需要的費用也將大大降低。

智慧型按摩療程機器人之研發
現今繁忙的社會裡,如果想要藉由按摩來紓解一下工作的壓力,大部分的人也許會請受過專業訓練的按摩師予以按壓舒活筋骨,但是整個按摩療程會花掉許多時間,且按摩師的服務是勞力密集的工作,往往只能為為數不多的客人服務;另外人本向來不便宜,一次按摩花費動輒上千元起跳。前面所述的缺點,都是機器人擅長的地方,機器人不會感到疲累,可以連續工作很長一段時間,且需要的費用也將大大降低。因此,本計畫構想從降低成本及自動化的角度考量用機器人來取代按摩的工作。
主要架構組成包括:按摩床主體、柔性手臂(Soft Arm)和靈巧手爪(Dexterous Manipulator)的半身人形機器人及影像偵測及生理訊號感測模組。其特色如下:
(1) 安全機器手臂
具有6個自由度,可實現人類手臂般靈巧的動作。機械手臂著重肩部、肘部關節安全機構的設計,藉由在驅動馬達輸出端加上機械式可控制剛性之關節機構設計,輔以智慧型控制系統,可有效避免機器手臂在運動過程中對人體產生不當的碰撞,達成安全機器手臂之功能。具有靜態及動態避障功能,可最小化驅動速度及加速度,及可對運作標的做功能最佳化。
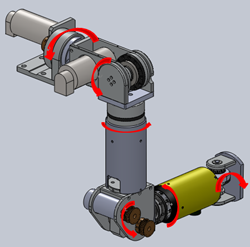
機械手臂圖
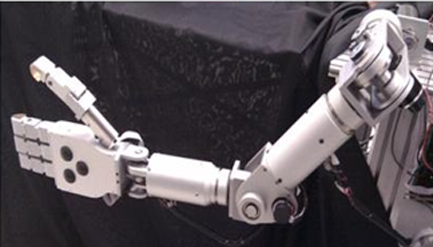
(2) 多指機器手掌
不同於既有國內外研發之機器手臂的運用訴求,以緊密模組化的手指設計,具有8個自由度,搭配高輸出扭力的馬達與減速機,四指機器手掌具有最高42N的輸出按摩力道,可模仿專業按摩師提供抓(Kneading)、揉(Rubbing)、拍(Tapping)、壓(Acupressure)等按摩療程,重現專業按摩師手掌的按摩力道與手法,提供使用者有效舒適的按摩療程。


機器手掌及指壓球
(3) 生理肌電信號回饋
為達按摩的舒適與安全,除壓力感測器回饋按摩力道的控制之外,藉由肌電信號的量測,提供最直接即時的生理信號,不但能達到按摩過程中即時的監控確保使用者安全,亦能經由分析肌電信號的時域特性電活性(Electrical Activity)與頻域參數中位頻率(Median Frequency),提供按摩前後按摩療程效果的量化評估。
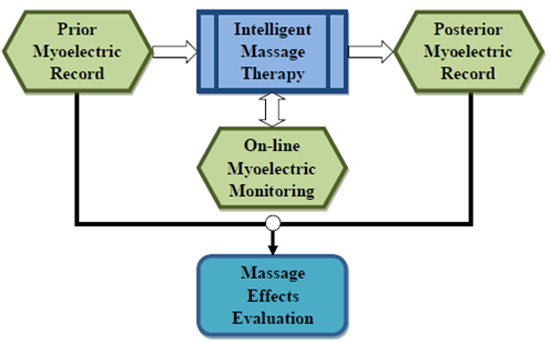
肌電訊號在按摩機器人系統的應用


按摩療程示意圖
人機互動-類人型機械手臂控制與應用
本中心設計的類人型機械手臂有六個自由度,以運動控制卡作為運算核心,將演算法燒錄至運動控制卡上以確保運算時脈的穩定性,並利用數位轉類比的訊號來實現扭矩控制的演算法。在演算法中,結合發展出的力回饋補償控制與阻抗控制使手臂達到順應性的現象。力回饋補償包含手臂多軸的重力補償與輔助力等補償控制,在重力補償部分,利用機器人座標轉換與三度空間向量投影找出其通解,簡化重力補償的難度,而輔助力上則提高了手臂的順應性。此外,補償器除了提升控制的性能,亦擴展到許多應用層面,提昇機械手臂與人的接觸式互動,如順應控制及教學〈Teach & Play〉等。
圖1及圖2為在教學與播放模式〈Teach & Play〉下,先由人教機器人寫字,機器人再自己寫一次的過程。由於機械手臂具有重力補償與輔助力等補償,機械手臂可輕易地被人所帶動,我們同時帶著機器人左右手寫字,使機器人左右手一同寫「台大頂尖中心」。經由編碼器回授,我們可得知在寫字過程中各軸馬達的角度,經紀錄後,再利用扭矩控制操控馬達,使機械手臂重現我們所教導的軌跡。
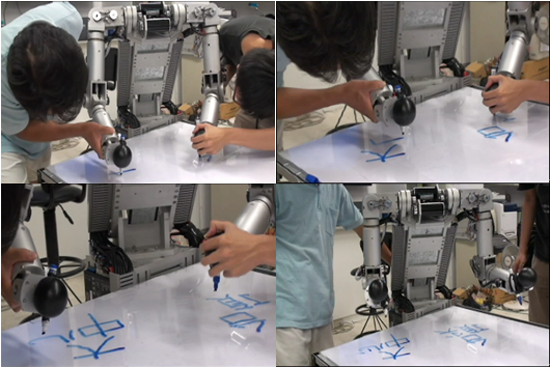
圖1、 在教學模式下,由人帶著機械手臂寫字,左右手齊寫「台大頂尖中心」
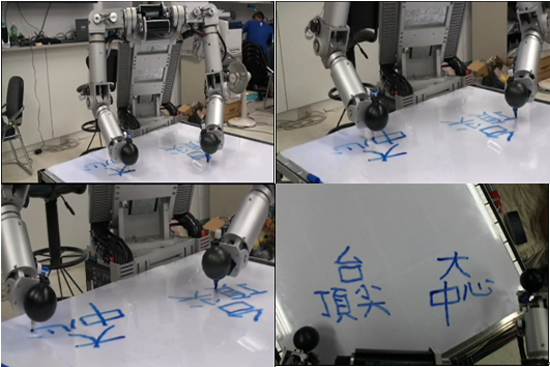
圖2、在播放模式下,機器人自己寫字,左右手齊寫「台大頂尖中心」
復健機器人系統
本計畫之目標為以多重感測器為基礎之雙側上肢復健機器人系統之研發與臨床應用,本計畫分成三個分項子計畫並由總計畫整合三個分項子計畫之相互密切關聯,包括硬體/軟體整合的Prototype,兼顧理論與實務,並包括相關臨床實驗的可行性與安全性評估成效報告。
以機器手臂的高精度、高再現度及可重複執行單調連續的動作的優點,針對病患上肢肩關節及肘關節進行復健與評估。在機器手臂復健治療過程中,設計規劃不同方向的平面直線軌跡訓練,病患透過主動式的命令下達,以使機器手臂帶著被復建之上肢依復建軌跡進行復健,同時機器手臂會記錄病患上肢運動時的位置、肩關節及肘關節角度、力量、藉由這些資訊建立出客觀的量化評估指標。
對上肢偏癱、全癱的病人,提出一套輔助復健的機器人,其重點在於藉由對稱性動作訓練病患受損的上肢,並修復大腦對於平衡性的功能。因此計畫可區分成三個階段為期三年實施,前兩個階段(前兩年)是針對上肢偏癱的病患,設計發展出”面向及背向外骨骼單側上肢復健機器人系統”,並期待利用病患本身功能正常的上肢自主性的輔助復健有問題的上肢, 並作有系統的單手復健可行性與安全性評估報告;而第三個階段(第三年)則是對於上肢全癱的病患,設計發展出”背向外骨骼雙側上肢復健機器人系統”利用病患本身所給予控制命令,讓病患自行控制外骨骼的動作,從而訓練運動神經的連接, 進而幫助病患上肢自主性的輔助復健須復健的上肢,且實行隨機控制臨床試驗來探討背向雙側上肢復建機器人系統可行性及安全性。
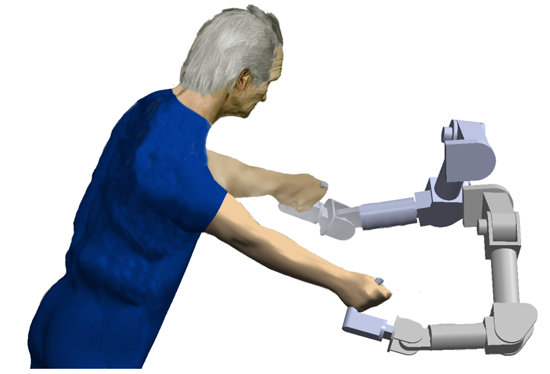
復健機器人
無感測器俱力量偵測功能之智慧型多自由度腹腔鏡機器人系統計畫
1.研究動機:
目前的腹腔鏡手術其CCD 鏡頭是由助手依醫師的指示來輔助操作,若配合默契好則能縮短手術時間,相對的若配合默契不好,則手術時間就會變長。本計畫使用安裝在醫師頭部的MotionNode來讓外科醫師能借由不同的頭部姿勢角度搭配安全啟動/鎖定機制來操作多自由度的CCD 鏡頭去定位並同時執行手術,因為醫師是佩戴HMD(Head Mount Display)頭戴式顯示器,所以可讓醫師在頭偏擺時不會失去對CCD所傳回的影像的掌握。而無感測器力回饋設計可讓醫師可感受到CCD鏡頭移動的阻力,以避免移動CCD 鏡頭時不慎觸傷病人體內組織器官。本計劃目標為解決人力短缺及醫師與助手間配合默契的問題,如此可增進醫師手術的效率同時也讓手術室的利用率提高。
2研究方法:
本計劃目標為解決人力短缺及醫師與助手間配合默契的問題, 如此可增進醫師手術的效率同時也讓手術室的利用率提高, 其整個系統架構如下圖所示.
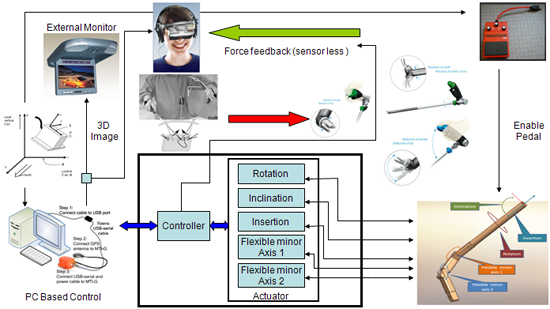
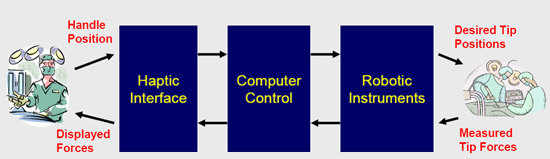
本計劃提出一無感測器的 Haptic 觸感技術, 直接讀取馬達驅動器回饋電流的大小, 如此就可由回饋電流的高/低而知道目前end-effector 的受力情形. 下圖是一俱力回饋的腹腔鏡手術概念流程圖.
3研究成果:
本計畫控制系統是使用Impedance Control 來控制Endoscope 的力量與位置分佈, 其控制架構模型如下,
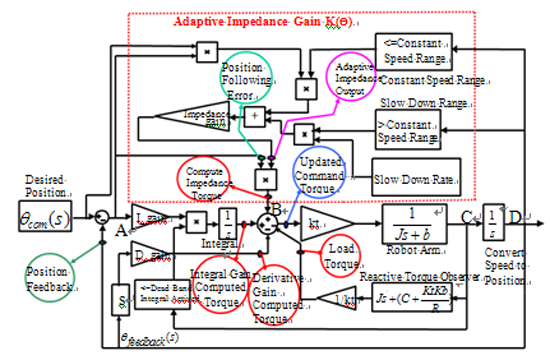
4創新性及貢獻:
上圖控制架構圖的紅框Adaptive Impedance Generator K(p) 部份即是為了能作到一有效率的速度控制, 我們希望當Endoscope 遠離目標物前能以一較高之速度往目標物前進, 而當接近目標物時能減速的接近目標物, 這是一個安全的設計作法.
本計畫設計之腹腔鏡設備之優點:
不須助手, 醫師一人即可操控CCD鏡頭及同時進行手術縮短手術時間, 解決解決人力短缺及醫師與助手間配合默契的問題, 如此可增進醫師手術的效率同時也讓手術室的利用率提高使用安裝在醫師頭部的MotionNode來讓外科醫師能借由不同的頭部姿勢角度搭配安全啟動/鎖定機制來操作五個自由度的CCD 鏡頭去定位並同時執行手術.
醫師是配戴質輕的HMD頭戴式顯示器, 所以可讓醫師在頭偏擺時不會失去對CCD所傳回的3D影像的掌握力,回饋設計可讓醫師可感受到CCD鏡頭移動的阻力, 以避免移動CCD 鏡頭時不慎觸傷病人體內組織器官比起達文西手術機器人, 本計畫之腹腔鏡手術設備相對輕巧且便宜.不增加病人手術之心理壓力,取代進口腹腔鏡手術設備.