JACO: 改善生活的機器人手臂

Kinova 是一家加拿大公司,從事個人機器人領域的設計和製造。在Kinova的專家團隊致力於提供實用的機器人平台,來解決現實和具體的日常生活中的問題,尤其是在康復方面。
Jaco 在2010年被引入康復市場。這是一個有三指的六軸機器人手臂。它被安裝在電動輪椅座椅框架,並使用相同的控制器。它是為了有嚴重的肌肉障礙,如肌肉萎縮症、肌萎縮性側索硬化症、脊髓損傷、多發性硬化症、及偶發神經系統疾病,而使用電動輪椅的人。

它可以幫助那些個人實現他們原本無法做的日常任務。例如,藉由其多功能手臂為自己倒一杯水。此外,可以把你的食物拿到桌上,並享用餐點。即使在你周圍的人都願意幫助你,但總不會比自己做的更好。
Kinova Robotics http://kinovarobotics.com/
手臂
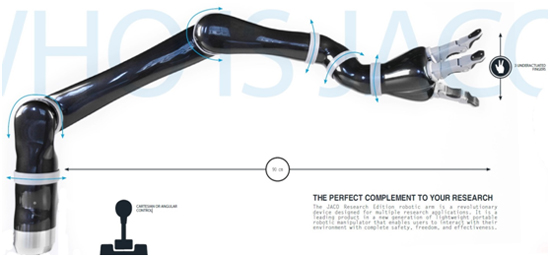
 JACO研究版有6自由度的無限制軸,能平穩無聲地旋轉。軸為鋁製設計的緊湊型致動器碟片。每個JACO機器臂包含2組不同的3個完全相同、可以互換、並易於更換的CADs,互相由零插入力(ZIF)電纜聯繫在一起。它的主要結構,完全由碳纖維製成,提供最佳的穩健性和耐久性,以及尖端的外觀和感覺。該臂被安裝在一個標準的鋁擠壓支撐結構,幾乎可以被固定到任何表面。
JACO研究版有6自由度的無限制軸,能平穩無聲地旋轉。軸為鋁製設計的緊湊型致動器碟片。每個JACO機器臂包含2組不同的3個完全相同、可以互換、並易於更換的CADs,互相由零插入力(ZIF)電纜聯繫在一起。它的主要結構,完全由碳纖維製成,提供最佳的穩健性和耐久性,以及尖端的外觀和感覺。該臂被安裝在一個標準的鋁擠壓支撐結構,幾乎可以被固定到任何表面。
夾持器
 夾持器由3隻欠驅動原理的手指組成,並可以單獨控制。其獨特的雙向注入塑料結構賦予他們具有很大的靈活性和無與倫比的抓握。JACO研究版的技術允許手指來適應任何物體,不論其形狀。因此,他們可以輕輕地拿起一個雞蛋,或牢牢握住一個罐子。
夾持器由3隻欠驅動原理的手指組成,並可以單獨控制。其獨特的雙向注入塑料結構賦予他們具有很大的靈活性和無與倫比的抓握。JACO研究版的技術允許手指來適應任何物體,不論其形狀。因此,他們可以輕輕地拿起一個雞蛋,或牢牢握住一個罐子。
控制器
JACO研究版可以由電腦或Kinova的3軸7鍵搖桿控制。控制是直觀的,並允許用戶使用3種不同的操縱模式:平移、旋轉、和抓握。此外,Kinova的智能迴避系統能保持JACO安全地遠離不想要的地方。這手臂非常靈活,可以適應所有用戶的需求。
軟體
JACO研究版採用了先進的應用程式介面(API),使程式員他們的經驗提高到另一個層次。這介面通過一個USB 2.0連接手臂,允許程式員配置高級參數和整合機器臂到自己的系統。此外,JACO研究版可以由任何一種導航系統來控制,以提供範圍廣泛的應用程序,比如從分析中央系統數據到編程自動化路徑。
應用
Kinova研製出易於使用的高效個人機器人平台。Jaco研究版對各類研究是理想的合作夥伴,例如:
學術界
憑藉其易於使用和完整的API函數庫,學生們能很快地瞭解機器人,並積極地開展機器人項目。
腦機介面
JACO研究版機械臂是以你的思想為基礎的控制的一種自然延伸。Kinova開發的逆運動學操作簡便,甚至能避免奇點。
臨床試驗
想驗證、開發或分析項目,使用一個機械臂做為技術性康復輔助嗎? JACO研究版提供你在臨床上開展研究所需要的一切。