Omnidirectional Touch Probe With Adaptive Maneuvering for 3-D Complex Object Machining and Measurement Verification Applications
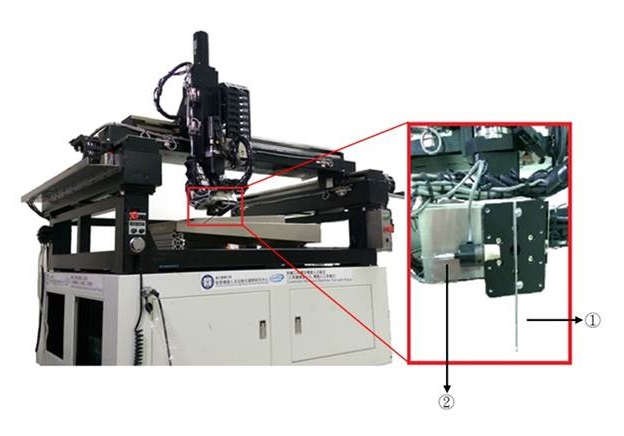
In this research, automated omnidirectional touch probe (ODTP) including adaptive tuning of the complex contour curve with optimal interpolation and motion planning based on a hybrid multiaxis robot (HMAR) with dual drive gantry-type machine (DDGM) are developed. It is called an “omnidirectional” because the 6-degrees of freedom ODTP in tool center point mode can always maintain normal direction towards the object contour curve. The new optimal solutions of the interpolation and motion planning are provided to tackle the small segments issues for a complex curvature object. We developed an algorithm to maintain maximum acceleration, so that it generates smooth and efficient three-dimensional reverse object in a higher order complex contour trajectory composed of piecewise small segments. As a result, the constant moving speed is very important to certain applications, such as gluing, welding, and laser cutting, to preserve quality processing. The utilization of object symmetry, extension, and synthesis properties to simplify the process of performing reverse engineering is described. These methods reduce the time required for the touch probe to detect the points. The experimental implementation to demonstrate the success of this research with video clip are developed.