Preview and Force Control of Non-Constant Height Biped Walking Robot
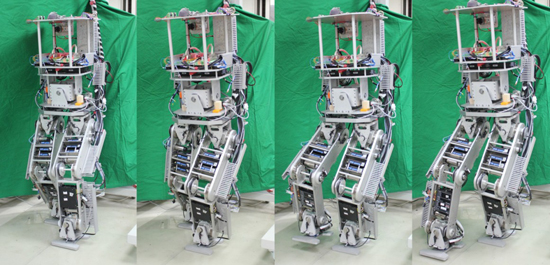
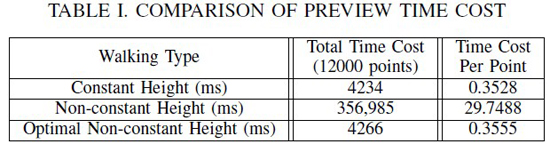
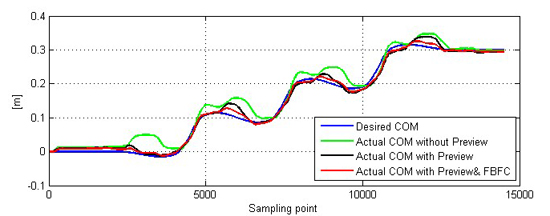
This project proposes a control architecture for the biped walking robot with non-constant COM height. The walking pattern with up and down COM motion is generated by preview control with optimal COM height trajectory to save time consumption. A feedback force controller takes the COM as the operating point to achieve a compensation of the motion of COM.

Proposed Approach or Methodology
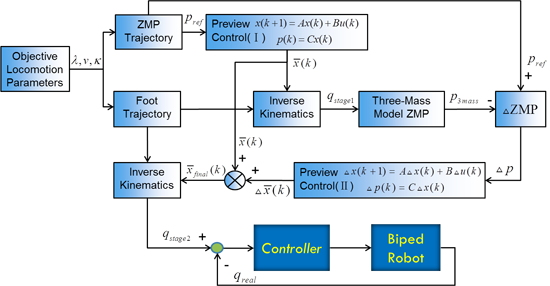
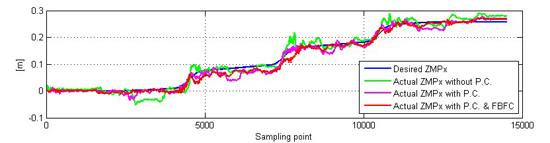
The complete control scheme of the trajectory generator based on preview control of the ZMP can be summarized preview control (Ⅰ) and preview control (Ⅱ). The ZMP reference is used to be previewed to calculate the optimal COG trajectory in preview control (Ⅰ). By this way, the future ZMP error is used to calculate a proper compensation in preview control (Ⅱ)
Expected result
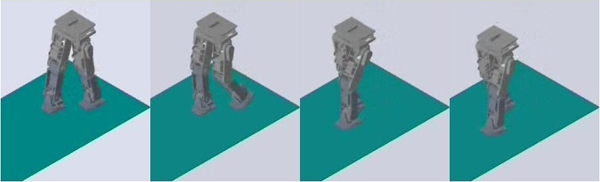
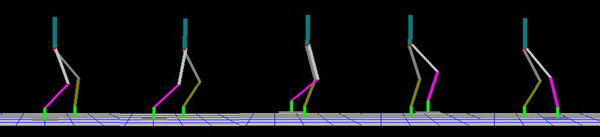
Fig.1 Optimize body height trajectory
Achievement