波士頓動力公司的下一步

我們很難從美國波士頓動力公司得到資訊,尤其在被Google收購後,但他們剛放了一部驚人的影片到YouTube上做宣傳,讓數以百萬計的人在電腦前就可以被他們最新型的機器人給震驚。
這個月早些時候,在麻省理工學院FAB11會議中,波士頓動力公司的總裁Raibert和他的成員在「製作機器人」的專題討論裡做了一個7分鐘的演講。Raibert的演講精選了一些我們以前從沒見過的影片,同時也暗示波士頓動力公司下一步將要做些什麼。
影片中Raibert展示出機器犬Spot (敏捷的自主四足機器人)用安裝在它身上的機器手打開門的影片;接著是ATLAS機器人在戶外進行動態行進的影片,這絕對是最新的。

看到這影片會讓人懷疑為什麼ATLAS機器人會在DRC Finals中會不斷跌倒,但是Raibert說,這裡的關鍵是機器人可以藉由快速地移動及動態地平衡來穩定自我,但是這種運作會耗掉大量不必要的動力,也不是當初DRC的設計宗旨。
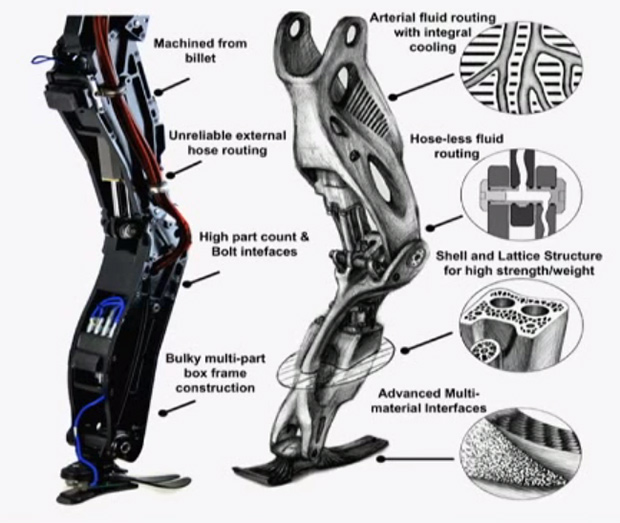
在圖的左方你可以看到ATLAS版本的腿:這是由一堆不同零件材料用螺栓組起來的;右邊是波士頓動力公司未來的版本,把液壓元件直接印到結構中用3D列印製造的腿。這看起來像有很多仿生設計在其中,如動脈狀流路和看起來非常像骨骼內的格狀結構。我們還沒有看到這東西的實際樣貌,但聽起來似乎波士頓動力公司已經有了一個。
根據Raibert所說:「我現在還不能向你們展示這台機器人,但我們正在積極繼續進行,而且我認為在今年底你們將可以看到我們的機器人,使用像這樣的製作方法。」
波士頓動力公司不是唯一一家研發此技術的公司,今年年初在國際機器人及自動化大會(ICRA)上,我們就看到Moog公司正在為伊利諾理工學院的HyQ四足機器人開發使用液壓驅動器的機器腿原型。
這些「高度集成智能驅動器」是使用3D列印疊加製造,並不是用管子輸送液體,而是液體透過驅動器自身結構中的管道直接輸送,讓其具有高堅固性。該驅動器也會更加小巧,重量更輕。