機器人學習用身體推行重物,就像你一樣

機器人的載荷量是一個明確定義的數字,通常指的是它本身的致動裝置或驅動系統可以支撐的物體重量。人類工作的載荷量與機器人是相似的,不同的是我們有時候可以作弊─例如將重物卸載到地上後,藉由克服摩擦力和推擠的方式來移動它。對於特別重的物體來說,要這樣做會使用到我們的重量,以及整個身體和肌肉的穩定性;而現在,機器人也在學習我們的方法。
上週召開的機器人與自動化國際會議(2015 ICRA)中,來自東京大學JSK實驗室的研究人員稻葉雅幸(Masayuki Inaba)教授和岡田 慧(Kei Okada)教授發表了一篇文章《全身推動接觸姿勢運用計畫》,或者形容為:推動物體。對人類來說,推動物體是有一點複雜,因為有很多不同推動重物(例如一個大木箱)的方法。你可以用你的肩膀頂住物件來推它,你也可以用臀部抵住物體來推;如果它真的很重,可將背部靠在上面,用雙腳推地來移動。
你選擇推動重物的姿勢是依據該物的重量和底部摩擦力的大小,但摩擦力通常是在你推動之前不會知道。所以你要怎麼做?你或許會先嘗試用手推,如果它不移動,你會換個可以使出更大力氣的姿勢。
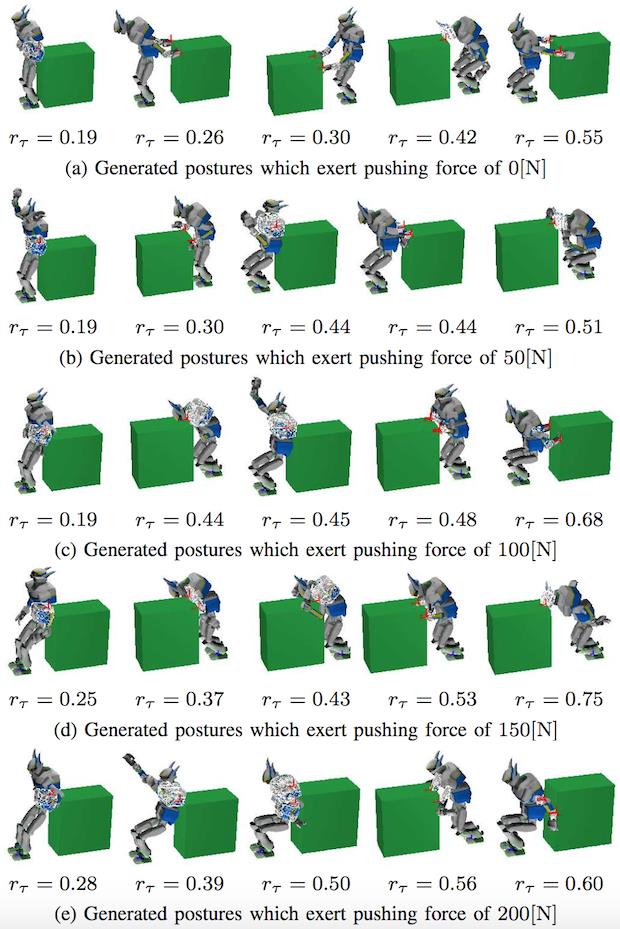
現在,機器人(HRP-2型)可以做到同樣的事:機器人會事先運算許多不同的推動姿勢,如果它沒有感覺到物體移動,就會試不同方式直到成功為止。
你會注意到機器人不會摔倒。機器人可以透過偵測機身傾斜的角度,來察覺物件移動的距離,以自動調整腳步大小。
接下來,研究人員打算將此方法運用到不同的任務之中,想必你和我一樣期待接下來的任務是什麼。
《人型機器人透過接觸姿勢利用全身推動重物》一文由東京大學室岡雅樹(Masaki Murooka)、 野澤峻一(Shunichi Nozawa)、垣內洋平(Yohei Kakiuchi)、岡田 慧(Kei Okada)和稻葉雅幸(Masayuki Inaba)在西雅圖召開的2015機器人和自動化國際會議上發表。